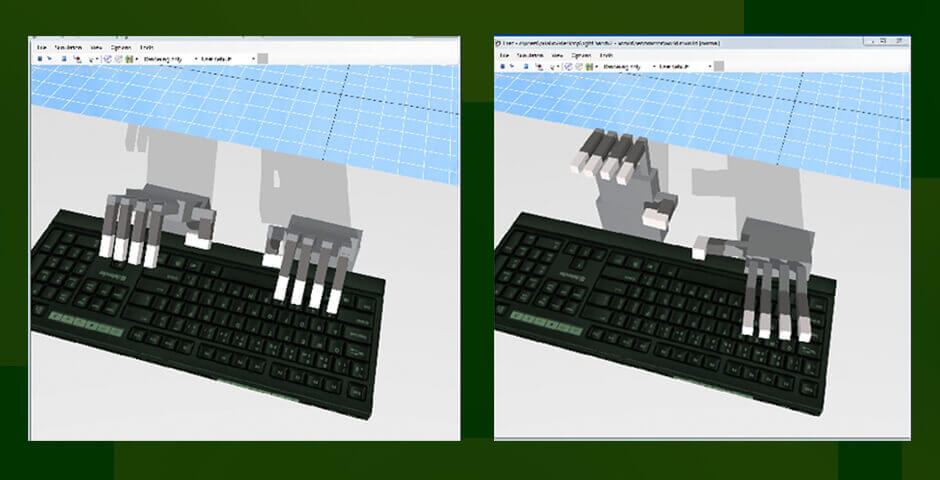
Данная модель демонстрирует применение симмуляторов робототехники и современных средств речевого взаимодействия. Программа реализует функционал управления движением робототехническим манипулятором: изменение положения как всей конструкции, так и отдельных её частей («пальцев»); а также естественный интерфейс вывода в качестве синтеза речи. Программа реализована на языке C/C++ в виде консольного приложения для взаимодействия с пользователем, а также окном визуализации манипулятора. Для реализации физических объектов и устройств используется библиотека Marilou 2010, являющаяся кроссплатформенной. Синтез речи реализован, используя технологию Microsoft Speech API и голосовой движок Maxim IVONA2.
«…позволяет ускорить и удешевить проектирование робототехнических систем, предварительно тестировать алгоритмы и работу в различных условиях …»
Данный управляемый манипулятор имеет артикуляционную конфигурацию функционирования (jointed arm), которя идентична движениям человеческой руки. Для осуществления движений используются сервомоторы.


